Що се отнася до създаването на роботизирани ръце, съществуват две основни школи. Едната поддържа позицията, че роботизираните ръце трябва да са семпли и праволинейни и просто да вършат работа – два или три захващащи пръста, които са способни да вършат почти всичко без особен фокус върху финия дизайн.
От другата страна стоят изключително сложни ръце с пет пръста, създадени да наподобяват максимално близко човешката ръка. Тази школа извежда вижданията си от теорията, че човешката ръка е създадена след милиони години целенасочена еволюция и реално всичко около нас е създадено благодарение на ръцете ни. Тоест ако искаме да и роботите да са способни на толкова много сложни операции, роботизираните ръце трябва да са максимално близки до човешките.
Тъй като човешката ръка е невероятно сложно творение, учените трябва да отчетат изключително много фактори и детайли, ако искат да създадат функционираща биомиметична антропоморфна ръка. В това отношение българският учен Емануил Тодоров и колегата му Че Шу (Zhe Xu), и двамата от Вашингтонския университет, наистина са надминали себе си. Двамата са създали най-сложната и точна от кинематична гледна точка биомиметична антропоморфна роботизирана ръка. Крайната им цел е един ден тези ръце да заменят напълно човешките.
Тодоров и Ху започнало от самото начало. Копирали механично човешката ръка по възможно най-точния начин. Първо сканирали човешка ръка от скелет и след това принтирали триизмерно изкуствени кости, което им позволило да направят дубликат на човешките стави.MjcyMDE4Mg
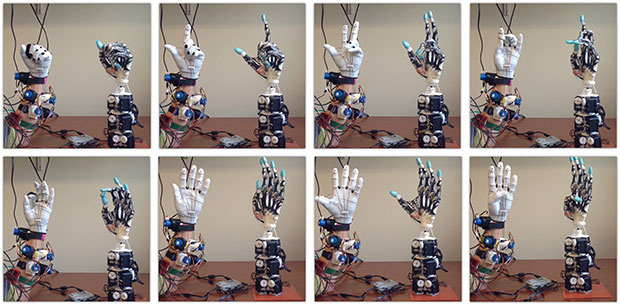
„Например движението на нашите палци се дължи на сложната форма на трапецовидната кост, намираща се в карпометакарпалната (КМК) става. Заради неправилната форма на трапецовидната кост осите на КМК ставите не са фиксирани. По тази причина никоя от съществуващите до момента антропоморфни роботизирани ръце не е способна да пресъздаде естествените движения на палеца чрез конвенционални механични стави, които изискват фиксирани въртящи се оси", обяснява Шу.
